TRCP-HOME > 機械情報PBL(Problem Based Learning) > 活動レポート・活動実績

2014年度
| 2014年5月 | ロボカップジャパンオープン2014で三位入賞 |
|---|
2013年度
| 2013年8月 | 工学部でLEGOの学習を試行しました |
|---|
機械情報PBLの4つの段階
| A:Practice | 作業など経験不足を補うためとにかく作ってみる。(担当:福田先生) |
|---|---|
| B:Problem | 作っていくうちに壁に当たるので、これを解決していく。(担当:水野先生) |
| C:Project | 小さいシステムではなく、少し複雑なシステムを複数人で作るためのプロジェクトに沿って行う能力を養う。(担当:水野先生) |
| D:Product | 他人でも使えるようにしっかりしたものを作る。(担当:岡田先生) |
レスキューロボット
【目標】1年生秋学期は一階制覇(B:Problem)、2年生は二階までの制覇(C:Project)

写真1
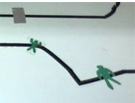
緑色の被災者
写真1の左側のラインは二階に行くラインですが、現在のルールではこのラインは取り払われ、超音波レンジファインダーなどを用いて壁を伝わって、二階に行くようになっています。この時のルールでは、緑と銀色の被災者を見つけたらLEDを点滅させることになっています。

写真2
写真2は坂を上れるかのチェックを行っているところです。
二階にもラインは無く、瓦礫(鉛筆を半分にしたようなもの)が散らばり、その中に被災者がいる設定になっています。
写真3と写真4はそのロボットの製作途中のものです。写真3は、超音波レンジファインダーとそれを回転させるサーボモーター、傾きを計測する3軸加速度センサー、被災者を見つけるカラーセンサーを搭載しています。写真4もほぼ同様ですが、車体が傾いてもライントレース用センサーが常に下を向くような機構がついています。
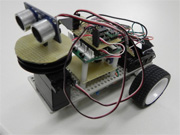
写真3
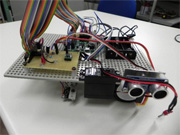
写真4
また、超音波レンジファインダーは右側に固定されており、片方の壁から一定の距離を保つようにプログラムされています。
![]()